TL;DR
MODUS unifies any-to-any multimodal generation with one decoderOne causal transformer trunk shared across every modality. No separate encoder + decoder, no modality-specific weights, no task pipelines., two expertsA 1D Expert handles discrete tokens via autoregressive next-token prediction. A 2D Expert handles continuous latents via flow matching. Both attend to the same causal context., and zero task headsTwo losses, summed: cross-entropy for 1D and flow matching for 2D. No segmentation, depth, or detection heads. No per-task decoders. Every modality goes through the same trunk..
Any-to-any modeling aims to flexibly relate arbitrary modalities within a single system, a need that arises in multimodal learning and in scientific domains like ecology and astronomy. Existing approaches mostly train from scratch with encoder–decoder or diffusion architectures, which limits performance and forgoes pretrained models.
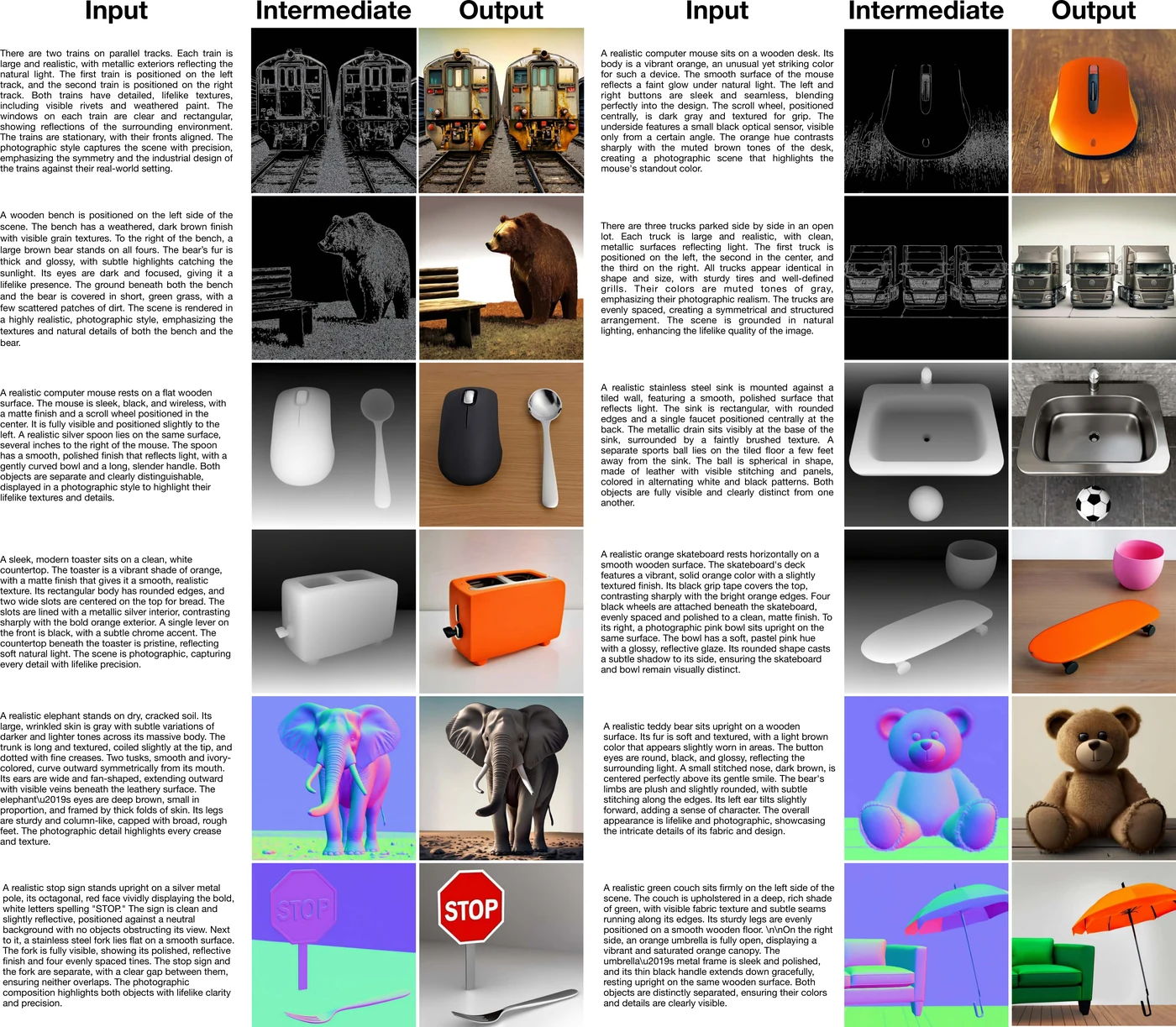
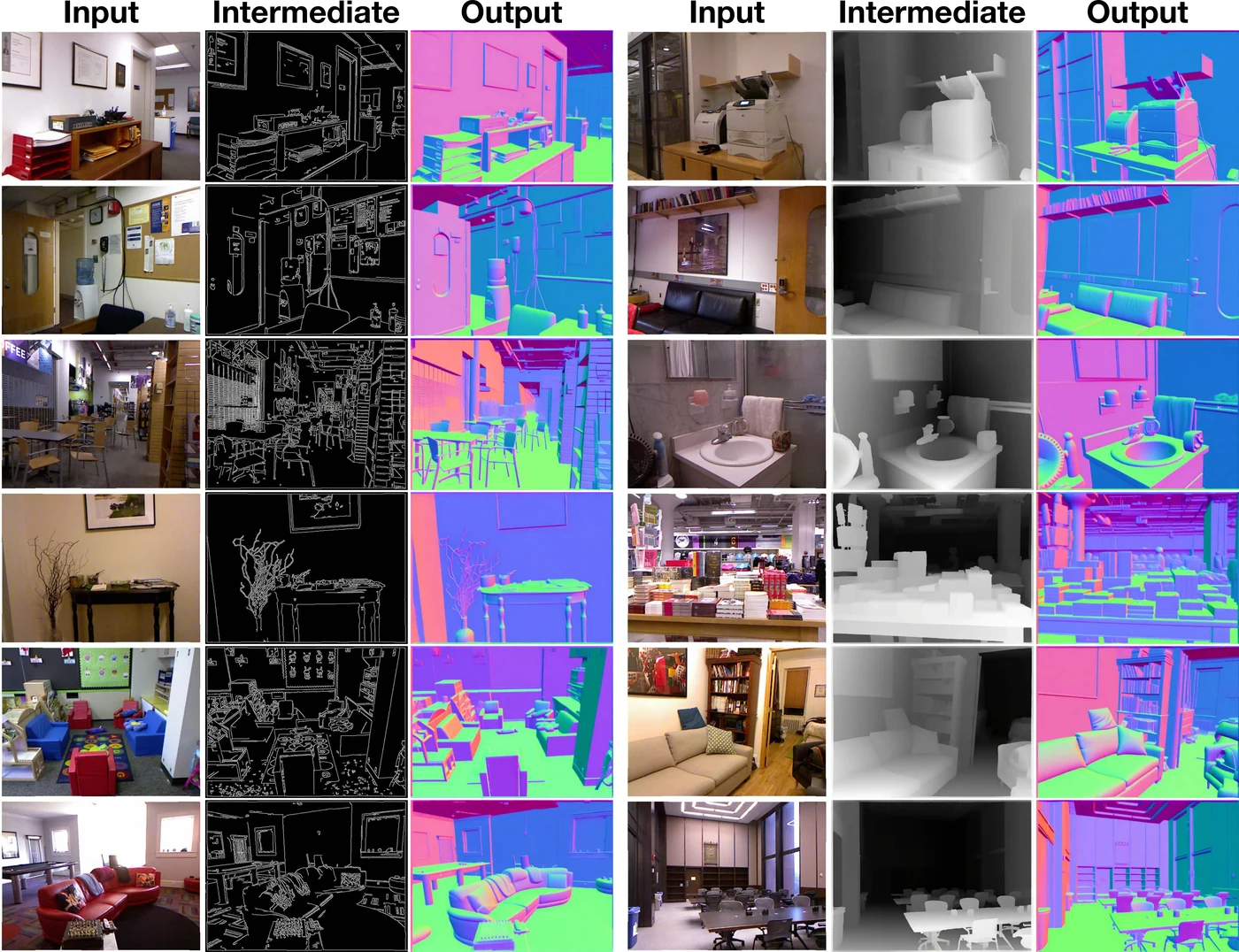
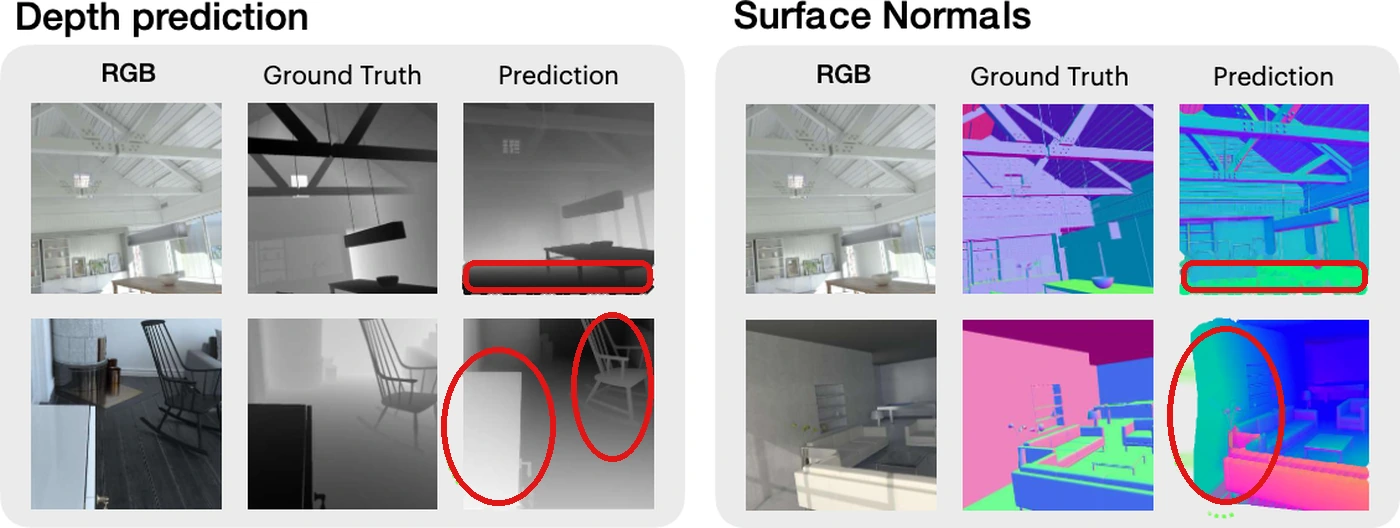
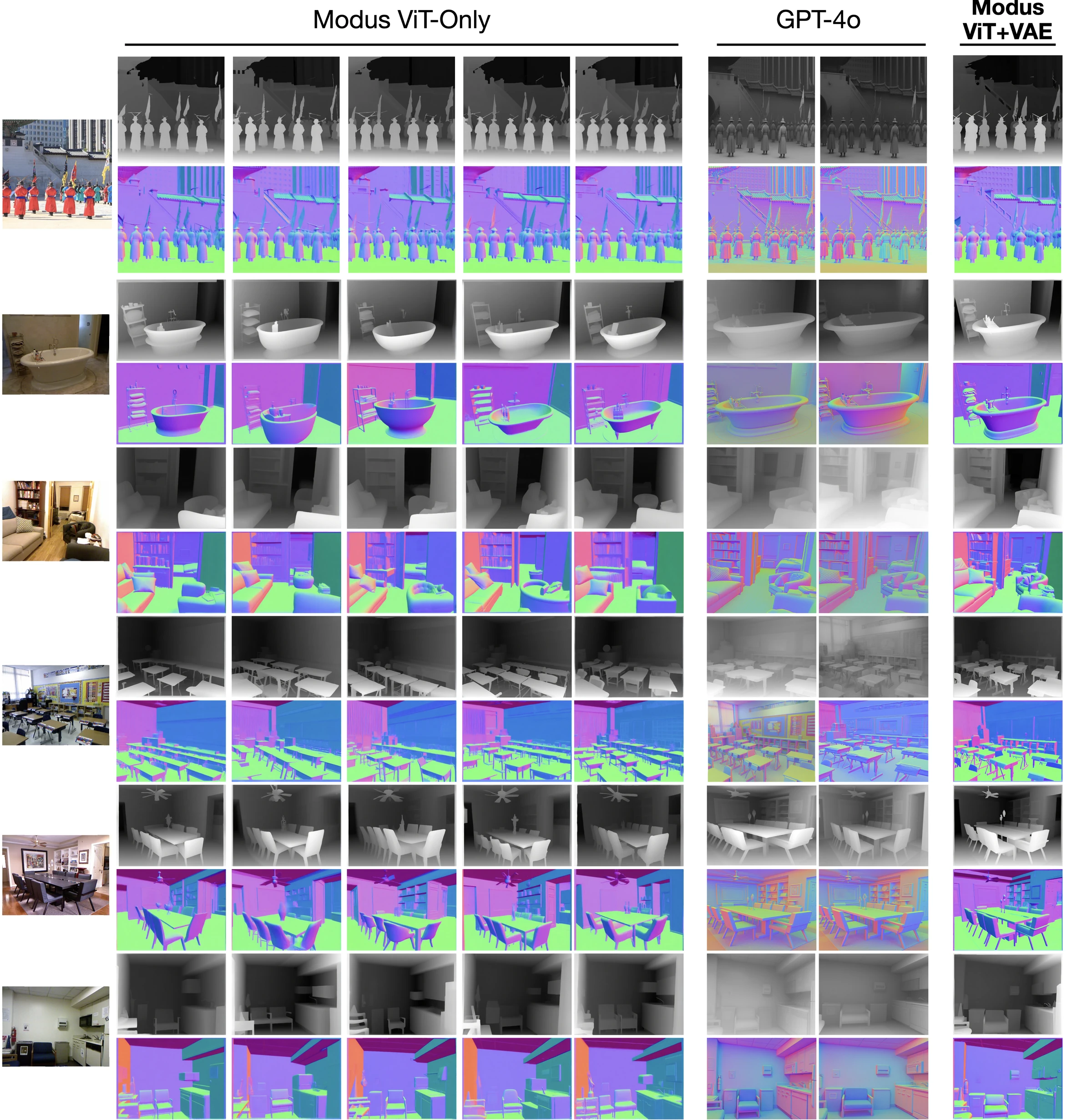
We investigate decoder-only any-to-any multimodal modeling: one decoder that treats every modality symmetrically, with no modality-specific heads, losses, or task pipelines. The resulting model, MODUS, can reuse its own outputs as new inputs, check generated images through grounding and VQA, and compare how ViT and VAE features affect dense visual prediction. Across a range of benchmarks, MODUS performs strongly out of the box and composes modalities flexibly in a single model.
The name MODUS comes from modus, the Latin root of modality.